Die Welt der Industrierobotik entdecken
Der 6-Achs-Roboter von fischertechnik ermöglicht es den Lernenden, sich intensiv mit der Industrierobotik auseinanderzusetzen und sich praktisch auf die Anforderungen der modernen Berufswelt vorzubereiten. Der realitätsnahe Sechsachsroboter wird fertig aufgebaut geliefert. Er kann sowohl mit einem Vakuum-Sauggreifer als auch mit einer Greifzange ausgestattet werden und kann schnell und einfach umgebaut werden. Drei der sechs Achsen werden mit Encoder Motoren gesteuert, drei weitere mit Digitalservos. Die Programmierung erfolgt wahlweise über Python oder ROBO Pro Coding. Eine Teach-In Oberfläche in ROBO Pro Coding ermöglicht darüber hinaus ein komfortables Eintrainieren verschiedener Positionen. Als Robotersteuerung dient der TXT 4.0 Controller. Durch das didaktische Begleitmaterial sowie die Interaktion mit unseren Modellen bilden die Lernenden neben technischem Know-how auch analytisches Denken, Problemlösungskompetenz und Praxis in der Teamarbeit aus.

Industrieroboter sind aus der modernen Fertigungsindustrie nicht mehr wegzudenken. Meistens werden Sie in Fabriken eingesetzt, um wiederkehrende Aufgaben schnell und mit hoher Präzision auszuführen.
In dieser Einführung befassen wir uns mit ihrem Aufbau und der grundsätzlichen Funktionsweise. Wir werfen einen Blick in ihre Entstehungsgeschichte und erfahren, warum Industrieroboter heutzutage in vielen Branchen unverzichtbar geworden sind.
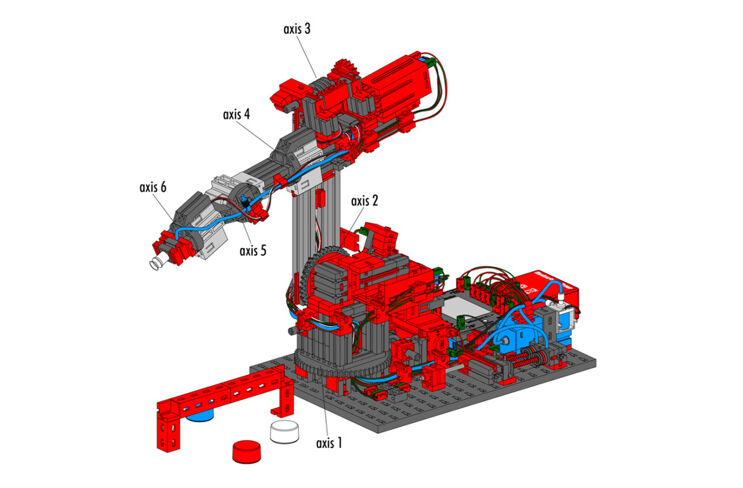
Industrieroboter bestehen aus einem Roboterarm, der verschiedene Gelenke aufweist. Eine für uns Menschen einfache Bewegung erfordert bei einem Roboter eine hochkomplexe Programmierung und Steuerung mehrerer Achsen. Grundsätzlich kann die Anzahl und Anordnung der Gelenke je nach Robotermodell variieren. Am weitesten verbreitet sind jedoch Knickarmroboter mit sechs Achsen oder Freiheitsgraden. Die Zahl der Freiheitsgrade gibt an, über wie viele unabhängige Bewegungsmöglichkeiten der Roboterarm verfügt. Bei sechs Freiheitsgraden kann der Roboter einen beliebigen Punkt im Raum mit einer beliebigen Orientierung erreichen. Dabei erfordert das Erreichen des Punktes drei Freiheitsgrade (nämlich die x, y, und z Koordinate) und das Erreichen der beliebigen Orientierung drei weitere Freiheitsgrade (nämlich die Verkippung in x, y und z Richtung). Den Aufbau und die Programmierung eines solchen 6-Achsroboters werden wir auch in diesem Baukasten kennenlernen.
Daneben gibt es für spezielle Anwendungen zahlreiche weitere Bauformen von Industrierobotern, wie zum Beispiel die sehr schnell beweglichen SCARA-Roboter und Delta-Roboter oder Seilroboter für besonders große Arbeitsbereiche.
Die Gelenke eines Industrieroboters werden in der Regel von leistungsstarken Elektromotoren angetrieben, da Industrieroboter oft schwere Bauteile oder Werkzeuge anheben. Über ein Wegmesssystem wird die aktuelle Position jedes einzelnen Gelenks erfasst und eine spezielle Regelung steuert die Elektromotoren so an, dass der Roboter den gewünschten Zielpunkt mit der gewünschten Geschwindigkeit anfährt. Darüber hinaus sind Industrieroboter mit einer Vielzahl von Sensoren ausgestattet, so dass sie ihre Umgebung wahrnehmen und ihre Aufgaben sicher und präzise ausführen können. Je nach Anwendung werden dabei Kameras, Tastsensoren, Kraftsensoren oder Sensoren zur Entfernungsmessung eingesetzt.
Am Ende des Roboterarms befindet sich das Werkzeug, das je nach Anwendung variieren kann:
Bewegen von Bauteilen: Mechanische Greifer, Vakuumgreifer
Fügen von Bauteilen: Stanzzange, Schweißzange, Klebepistole
Montage: Schrauber
Vermessen von Bauteilen: Lasermesssystem, Kamera
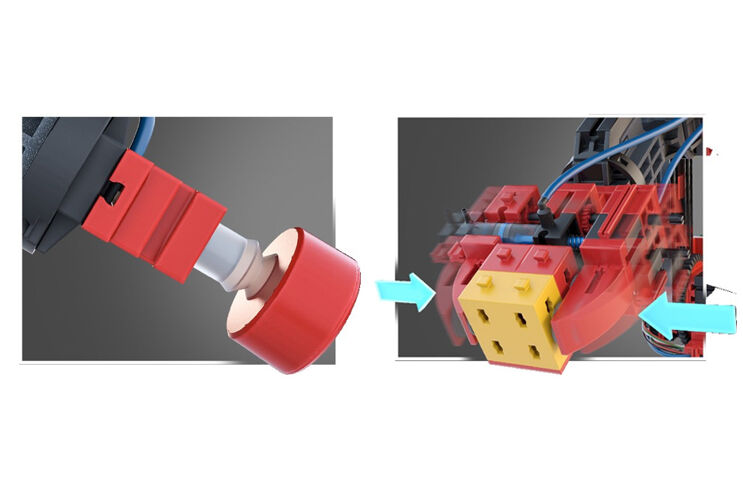
Einige Roboter sind sogar in der Lage, ihr Werkzeug automatisch und selbstständig zu wechseln. Zur Versorgung der Werkzeuge mit Energie stellen Industrieroboter typischerweise elektrische Anschlüsse oder einen Anschluss an das Druckluftsystem bereit. Der Industrieroboter im Baukasten verfügt über einen Vakuumgreifer und kann darüber hinaus auf einen pneumatischen Greifer umgerüstet werden.
Abhängig von der jeweiligen Anwendung können Industrieroboter verschiedene Bewegungen ausführen, von linearen Bewegungen über Drehbewegungen bis hin zu komplexen Bewegungsmustern. Die sogenannte Bahn, d.h. die Position des Werkzeugs im Laufe der Zeit, sowie die Geschwindigkeit werden bei der Programmierung des Roboters festgelegt.
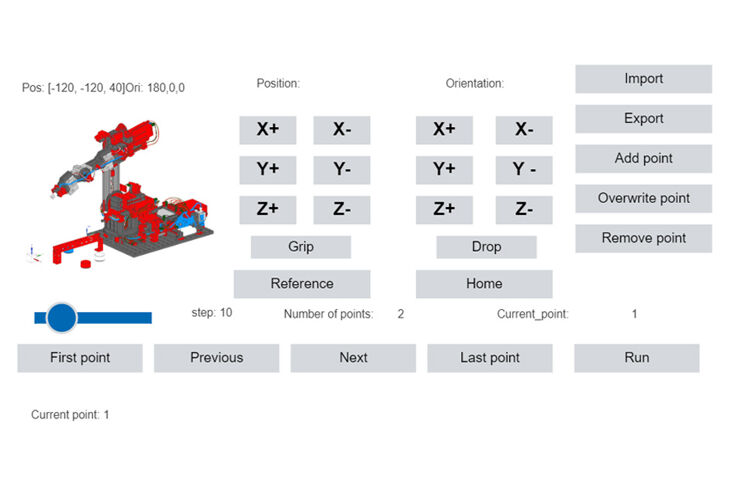
Industrieroboter werden durch vorprogrammierte Anweisungen gesteuert, die als Roboterprogramme bezeichnet werden. Diese Programme werden von Technikern und Ingenieuren entwickelt und enthalten eine Abfolge von Befehlen, die den Roboterarm und andere Komponenten steuern. Die Programmierung kann auf verschiedenen logischen Ebenen erfolgen: In niederen Sprachen wie beispielsweise dem G-Code werden die einzelnen Zielkoordinaten einprogrammiert, die der Roboter nacheinander anfährt. Die Teach-In-Programmierung vereinfacht die Roboterprogrammierung, indem ein Mitarbeiter zunächst den Roboter mithilfe einer Fernbedienung an die gewünschten Positionen verfährt und diese jeweils abspeichert („teachen“). Anschließend kann der Roboter die gelernten Abfolgen an Positionen selbständig wiederholen. Mit moderner Software können Industrieroboter auch in einer virtuellen Welt simuliert und programmiert werden und das Programm erst später auf den Roboter geladen werden. Diese sogenannte Offline-Programmierung bietet den Vorteil, dass der Roboter gleichzeitig eine andere Aufgabe ausführen kann und damit produktiv bleibt. Wir werden in diesem Begleitmaterial die einzelnen Schritte von der Ansteuerung einer einzelnen Achse bis zur Teach-In Programmierung kennenlernen.