- Home
- Schulen
- Lernmaterial
- STEM Coding Competition


Download der ROBO Pro Coding App
Bevor es losgeht, muss noch die App heruntergeladen werden. Einfach das passende Betriebssystem auswählen und auf den Link klicken:

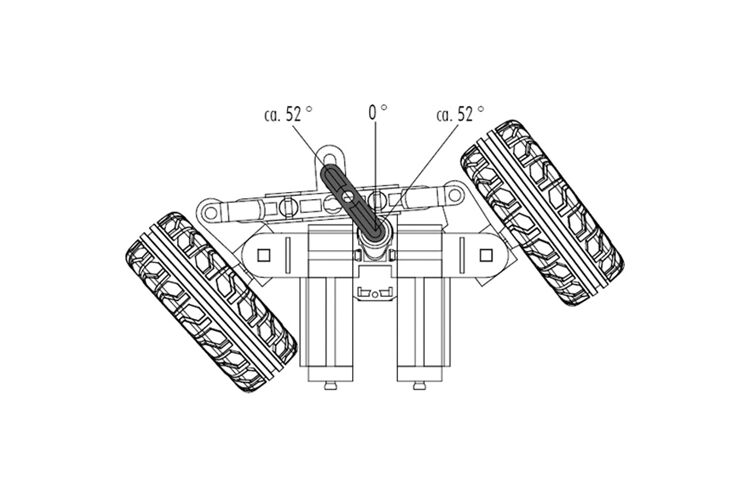
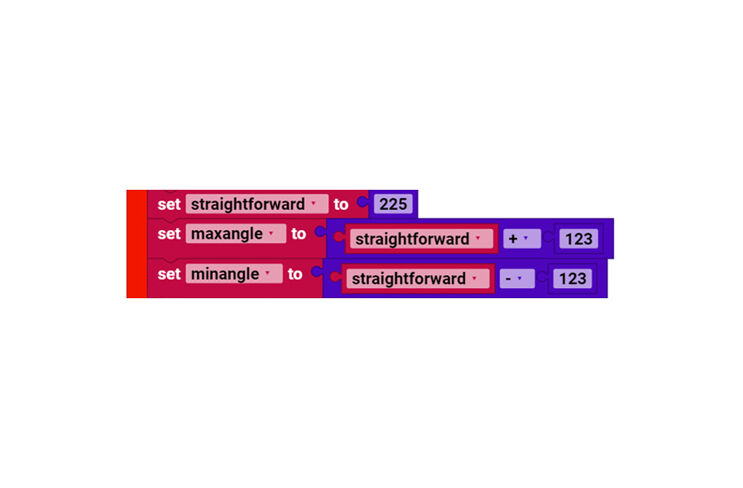
Die Stellungen des Servohebels variieren bei unterschiedlichen Servo-Motoren. Deshalb empfiehlt es sich die Nullstellung, sowie die maximale Auslenkung über Variablen zu kalibrieren.
Wenn du einen individuellen Aufbau für die Achsschenkellenkung verwendest, achte darauf, dass der Servohebel nicht am Servohalter oder an deinem Chassis anschlägt. Die maximale Auslenkung bis zum Anschlag am Servohalter beträgt +/- 58°.
Weitere Informationen
Für weitere Anregungen deines Robotik-Projekts findest du diverse Beispielprogramme inklusive konfiguriertem Display oder Kamera in Robo Pro Coding. Wähle dazu in einem neuen Projekt keine leere Vorlage, sondern „Beispiel“ aus.
Die Dokumentation von Robo Pro Coding kannst du mit folgendem Link aufrufen:
ROBO Pro Coding Bücher