
Ich krieg die Kurve!
Differenzierungsmöglichkeiten
Je nach Dauer der Unterrichtsreihe und der Stärke der SuS können
Motivationale Aspekte
Das Thema autonome Fahrroboter ist allen SuS aus dem Alltag bekannt. In vielen Haushalten gehören Staubsaug- oder Rasenmähroboter neben vielen weiteren smarten Anwendungen längst zum Alltag. Teilautonom fahrende Automobile sind immer häufiger auf den Straßen anzutreffen.
|
Funktionen der Aktoren/Sensoren |
Technische Lösung |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
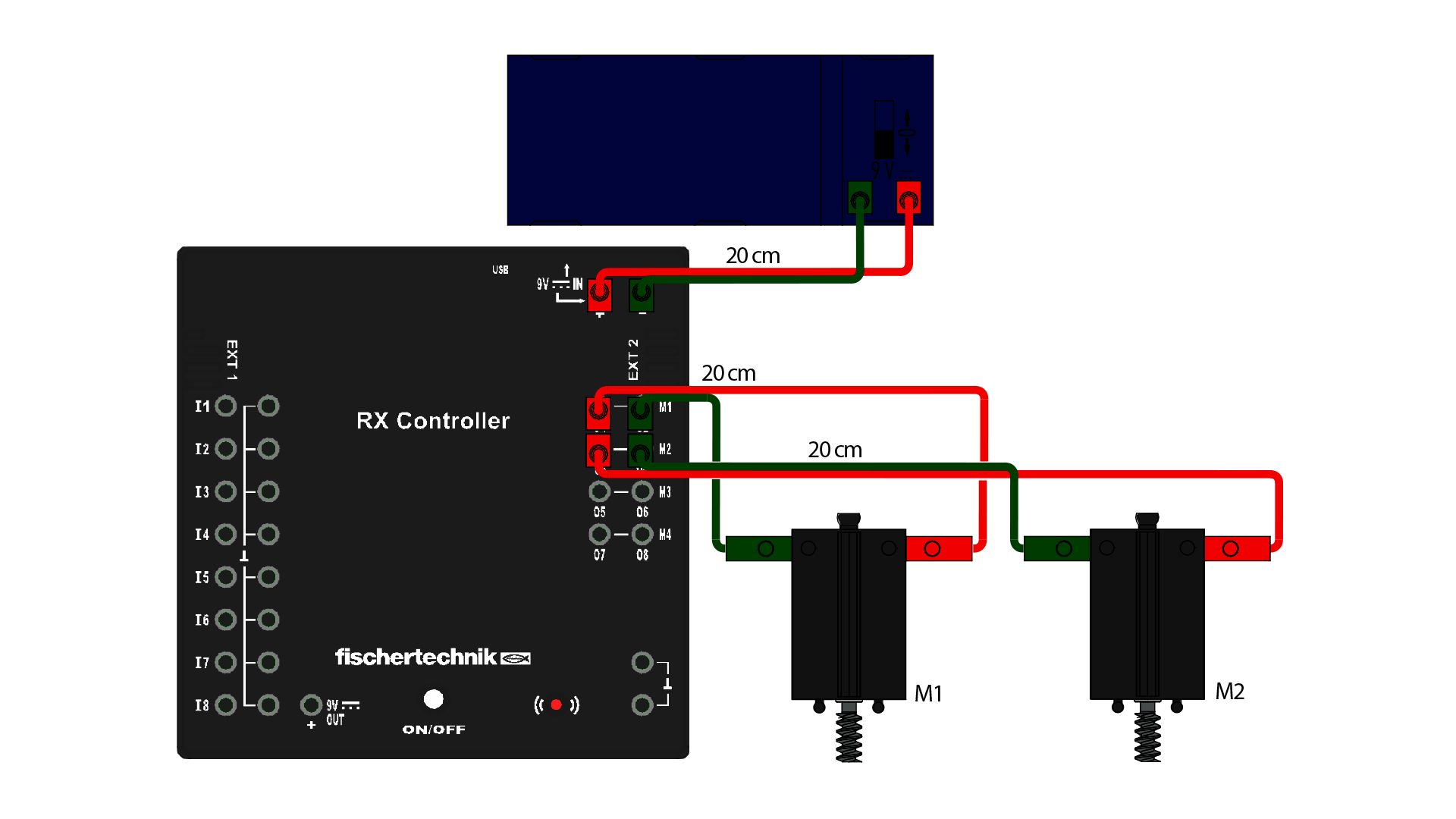
Materialliste Grundschaltung des Fahrroboters
|
Sensoren |
Funktion |
|
1 On/Off Taster am Controller |
1. Einschalten des Roboters 2. Not-Stop des Roboters
|
|
Aktoren |
Funktion |
|
2 Motoren
|
Bewegung |
{kind=link}