- Home
- Spielzeug
- E-Learning
- Smart Robots Max

Wir freuen uns, dass du dich für den Baukasten „Smart Robots Max“ von fischertechnik entschieden hast. Mit diesem Baukasten kannst du eine Menge interessanter Experimente durchführen und spannende Aufgaben lösen.
Beim Durchlesen des Begleitmaterials und Ausprobieren der Experimente und Aufgaben wirst du Schritt für Schritt lernen, wie man mit dem RX Controller von fischertechnik einfache und auch komplizierte Maschinen und Roboter steuern und programmieren kann.
Wie das beim Lernen nun mal so ist, kann man nicht sofort mit den schwierigsten Sachen anfangen, auch wenn die natürlich oft ein bisschen interessanter sind als die etwas einfacheren. Darum haben wir die Experimente und Aufgaben so aufgebaut, das du mit jeder neuen Aufgabe etwas anderes dazu lernst, dass du dann wieder bei der nächsten Aufgabe einsetzen kannst.
Also keine Angst, wir fangen klein an und arbeiten uns dann gemeinsam zu den großen Robotern vor.
Jetzt wünschen wir dir viel Spaß und Erfolg beim Experimentieren mit dem Smart Robots Max.
Dein Team von
fischertechnik

Das ist alles im Baukasten mit drin
Zunächst einmal findest du zahlreiche fischertechnik-Bausteine, außerdem Motoren, Lampen und Sensoren, sowie eine farbige Bauanleitung zum Bau der verschiedenen Modelle.
Wenn du die Bausteine alle ausgepackt hast, musst du einige Komponenten zuerst montieren, bevor du loslegen kannst (z. B. Kabel und Stecker). Welche das genau sind, ist in der Bauanleitung unter „Montagetipps“ beschrieben. Erledige das am besten gleich als Erstes.
Aktoren
Als Aktoren werden alle Bauteile bezeichnet, die eine Aktion ausführen können. Das bedeutet, wenn man sie an einen elektrischen Strom anschließt, werden sie in irgendeiner Form „aktiv“. Meistens kann man das direkt sehen. Ein Motor dreht sich, eine Lampe leuchtet, usw
Mini-Motor
Der Mini-Motor ist ein Elektromotor, der genau so lang und so hoch ist wie ein fischertechnik-Baustein. Außerdem ist er sehr leicht. Dadurch kannst du ihn an Stellen einbauen, an denen für die großen Motoren kein Platz ist.

Getriebe
Das Getriebe, das im Baukasten dabei ist, passt genau an den Mini-Motor. Der Mini-Motor ist für eine Versorgungsspannung von 9 Volt und einen Stromverbrauch von maximal 0,3 Ampere ausgelegt.

LEDs
Eine LED ist im Baukasten enthalten. Sie kann zum Beispiel als Signallicht verwendet werden oder als Blinklicht an einem Roboter.
Achtung:
Beim Anschluss der LED an die Stromversorgung musst du auf die richtige Polung achten. Der Plus-Pol muss bei der + Markierung an die LED angeschlossen werden.

Sensoren
Sensoren sind die Gegenstücke zu den Aktoren. Denn sie führen keine Aktionen aus, sondern reagieren auf bestimmte Situationen und Ereignisse. Ein Taster reagiert zum Beispiel auf einen „Knopfdruck“, indem er einen elektrischen Strom durchlässt oder unterbricht. Ein Wärmesensor reagiert auf die Temperatur in seiner Umgebung.
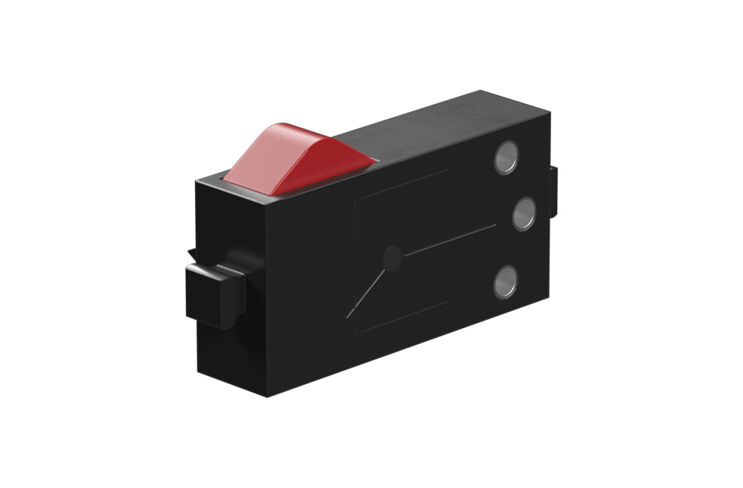
Taster
Der Taster wird auch Berührungssensor genannt. Beim Betätigen des roten Knopfes wird mechanisch ein Schalter umgelegt, es fließt Strom zwischen den Kontakten 1 (mittlerer Kontakt) und 3. Gleichzeitig wird der Kontakt zwischen den Anschlüssen 1 und 2 unterbrochen. So kannst du den Taster auf zwei verschiedene Arten verwenden:
Als „Schließer“:
Kontakte 1 und 3 werden angeschlossen. Taster gedrückt: Es fließt Strom. Taster nicht gedrückt: es fließt kein Strom
Als „Öffner“:
Kontakte 1 und 2 werden angeschlossen. Taster gedrückt: Es fließt kein Strom. Taster nicht gedrückt: Es fließt Strom.
Gestensensor
RGB-Gestensensor 6-polig. Messgrößen: Farbe (RGB), Umgebungshelligkeit, Abstände bis ca. 15 cm, Gestenerkennung in 6 Richtungen. Eine ausführliche Beschreibung findest du in der Modellprogrammierung „Dämmerungsschalter“.

IR-Spursensor
Der Infrarot-Spursensor ist ein digitaler Sensor zur Erkennung einer schwarzen Spur auf weißem Untergrund mit einem Abstand von 5 – 30 mm. Er besteht aus zwei Sende- und Empfängerelementen.

Software ROBO Pro Coding
„Grafische Programmieroberfläche“ bedeutet, dass du die Programme nicht Zeile für Zeile von Hand „schreiben“ musst, sondern mit Hilfe von grafischen Symbolen einfach bildlich zusammenstellen kannst.
Wie man so ein Programm genau erstellt, ist in dem Kapitel „Erste Schritte“ ausführlich beschrieben.
RX Controller
Der RX Controller ist das Herzstück dieses Baukastens. Er steuert die Aktoren und wertet die Informationen der Sensoren aus.
Für diese Aufgabe verfügt der RX Controller über zahlreiche Anschlüsse, an die du die Bauteile anschließen kannst.

Der Controller verfügt über:
Wie der Controller mit den einzelnen Bauteilen umgeht und was diese im Einzelnen machen sollen, legst du durch das Programm fest, das du in der Software ROBO Pro Coding erstellst.

Stromversorgung
Weil viele der Bauteile des Smart Robots Max mit Strom funktionieren, brauchst du natürlich auch eine Stromversorgung.
Im Baukasten ist hierfür der fischertechnik Batteriehalter für 6 AA Batterien (6x1,5V=9V) enthalten. Die Batterien selbst sind nicht Inhalt des Baukastens. Öffne den Batteriehalter und lege 6 Batterien vom Typ AA ein. Achte dabei auf die richtige Polung. Die Kennzeichnung an jedem Batteriefach zeigt dir, wie jede Batterie richtig eingelegt wird.



