Introducción a los robots industriales
Los robots industriales se han convertido en parte integrante de la industria manufacturera moderna. Se utilizan sobre todo en fábricas para realizar tareas repetitivas de forma rápida y con gran precisión. En esta introducción veremos su estructura y funcionalidad básica. Echaremos un vistazo a la historia de su desarrollo y descubriremos por qué los robots industriales se han vuelto indispensables en muchas industrias hoy en día.
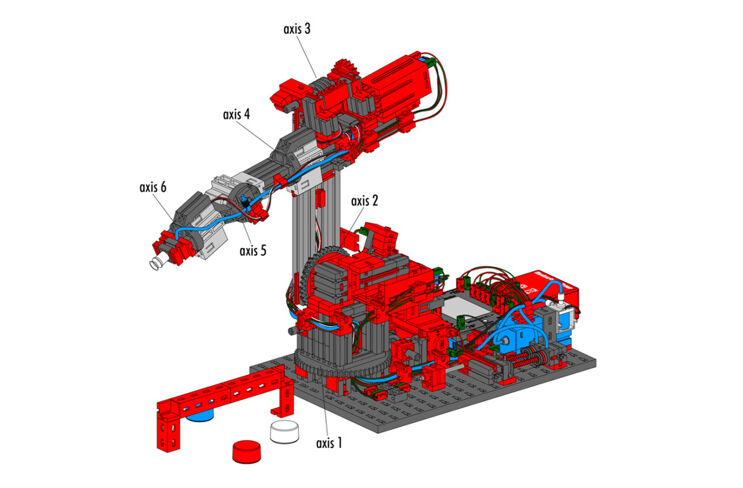
Los robots industriales constan de un brazo robótico con varias articulaciones. Un movimiento que para nosotros, los humanos, es sencillo requiere una programación y un control muy complejos de varios ejes en un robot. En principio, el número y la disposición de las articulaciones pueden variar en función del modelo de robot. Sin embargo, los robots articulados con seis ejes o grados de libertad son los más comunes. El número de grados de libertad indica cuántas opciones de movimiento independiente tiene el brazo del robot. Con seis grados de libertad, el robot puede alcanzar cualquier punto del espacio con cualquier orientación. Alcanzar el punto requiere tres grados de libertad (las coordenadas x, y y z) y alcanzar cualquier orientación requiere otros tres grados de libertad (la inclinación en las direcciones x, y y z). En este kit de construcción también aprenderemos a estructurar y programar un robot de 6 ejes.
También existen muchos otros tipos de robots industriales para aplicaciones especiales, como los robots SCARA de movimientos muy rápidos y los robots Delta o de cable para áreas de trabajo especialmente grandes.
Las articulaciones de un robot industrial suelen accionarse mediante potentes motores eléctricos, ya que los robots industriales suelen levantar componentes o herramientas pesadas. La posición actual de cada articulación individual se registra mediante un sistema de medición de posición y un sistema de control especial controla los motores eléctricos para que el robot se desplace al punto de destino deseado a la velocidad deseada. Además, los robots industriales están equipados con un gran número de sensores para que puedan percibir su entorno y realizar sus tareas con seguridad y precisión. Dependiendo de la aplicación, se utilizan cámaras, sensores táctiles, sensores de fuerza o sensores para medir distancias.
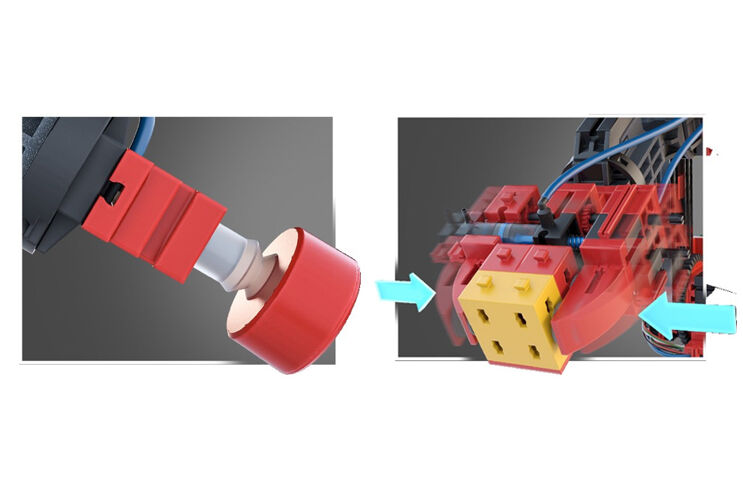
Algunos robots son incluso capaces de cambiar de herramienta de forma automática e independiente. Para suministrar energía a las herramientas, los robots industriales suelen disponer de conexiones eléctricas o una conexión al sistema de aire comprimido. El robot industrial del sistema modular tiene una pinza de vacío y también puede convertirse en una pinza neumática.
En función de la aplicación de que se trate, los robots industriales pueden realizar diversos movimientos, desde movimientos lineales y giratorios hasta patrones de movimiento complejos. La denominada trayectoria, es decir, la posición de la herramienta a lo largo del tiempo, y la velocidad se definen al programar el robot.
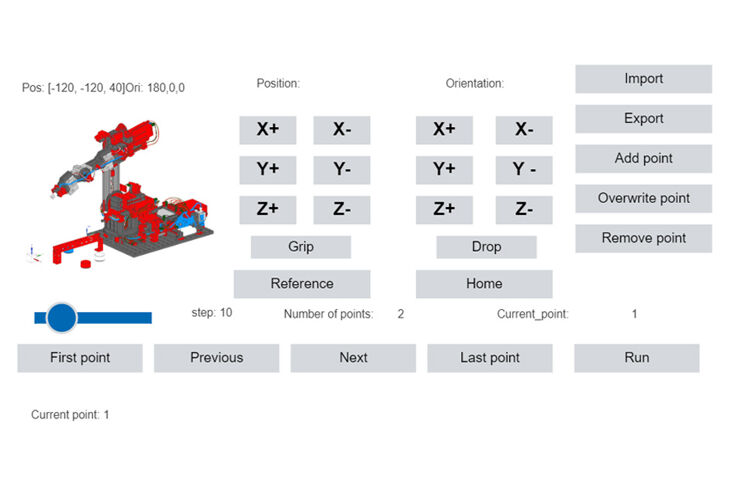
Los robots industriales se controlan mediante instrucciones preprogramadas conocidas como programas de robot. Estos programas son desarrollados por técnicos e ingenieros y contienen una secuencia de órdenes que controlan el brazo del robot y otros componentes. La programación puede realizarse a distintos niveles lógicos: En lenguajes de bajo nivel, como el código G, se programan las coordenadas individuales de los objetivos, a los que el robot se desplaza uno tras otro. La programación Teach-in simplifica la programación del robot en la medida en que un empleado mueve primero el robot a las posiciones deseadas utilizando un mando a distancia y las guarda ("enseña"). A continuación, el robot puede repetir las secuencias de posiciones aprendidas de forma independiente. Con el software moderno, los robots industriales también pueden simularse y programarse en un mundo virtual y cargar el programa en el robot más tarde. Esta programación offline ofrece la ventaja de que el robot puede realizar otra tarea al mismo tiempo y seguir siendo productivo. En este material complementario nos familiarizaremos con cada uno de los pasos, desde el control de un solo eje hasta la programación teach-in.