
¡Agarro la curva!
Opciones de diferenciación
Según la duración de la serie de clases y el nivel de habilidad de los estudiantes, se pueden realizar las siguientes opciones:
Aspectos motivacionales
El tema de los robots de conducción autónoma es conocido por todos los estudiantes en su vida diaria. En muchos hogares, los robots aspiradores o cortacéspedes, junto con muchas otras aplicaciones inteligentes, son parte cotidiana. Los automóviles que conducen de manera semi-autónoma son cada vez más frecuentes en las carreteras.
|
Actuators
|
Function |
|
2 motores
|
Movimiento |
|
Functiones de los actuadores/sensores |
|
|
Realización de un movimiento rectilíneo |
|
|
Ejecución de un movimiento curva a la izquierda |
|
|
Ejecución de un movimiento curva a la derecha |
|
|
Inicio de un recorrido del robot |
|
|
Fin de la marcha de emergencia de un robot |
|
|
Diferenciación:Giro rápido en el lugar (izquierda/derecha) |
|
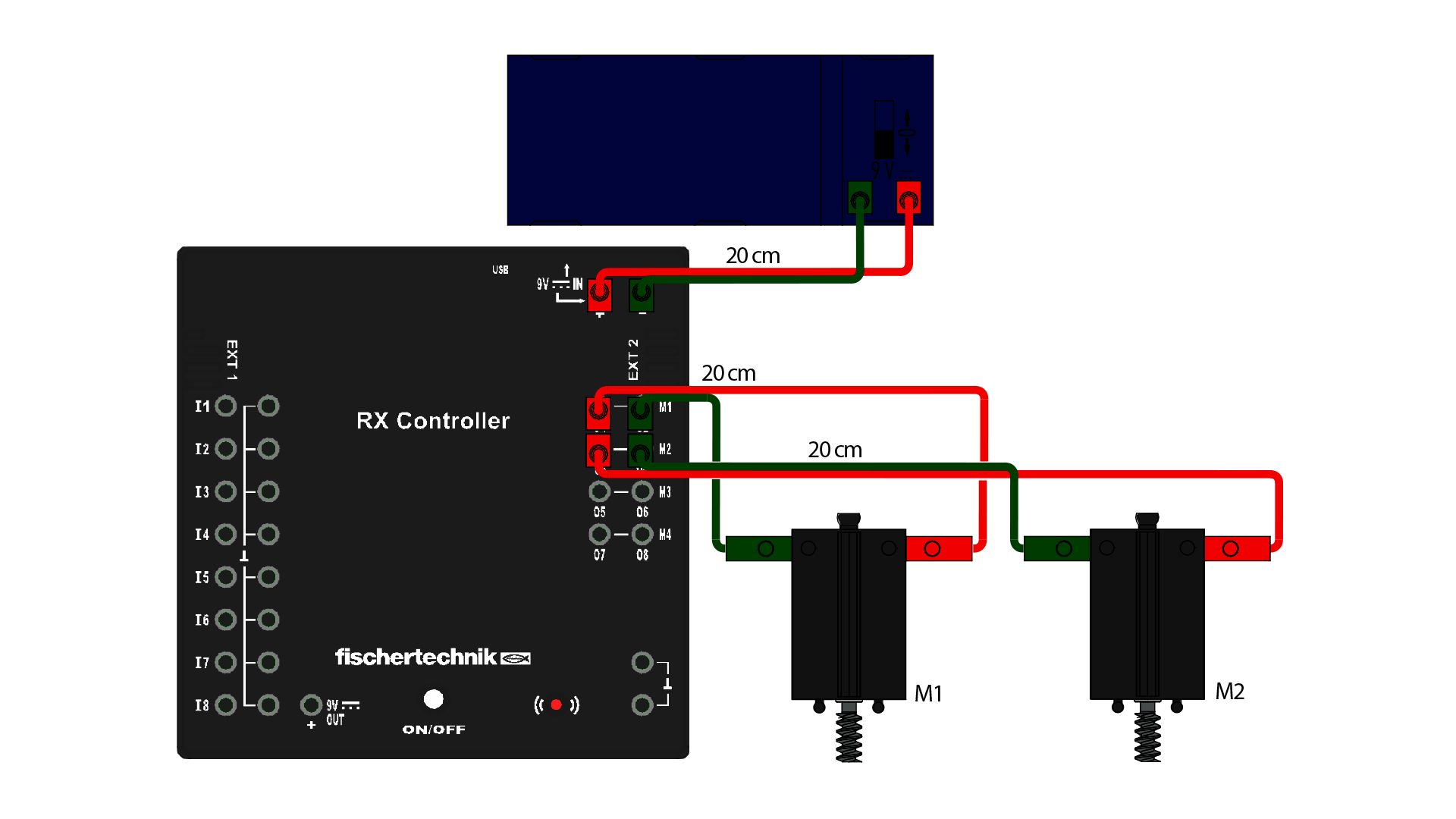
Lista de materiales del circuito básico del robot móvil
|
Sensores
|
Función |
|
1 botón de encendido/apagado en el controlador
|
1. Encendido del robot 2. Parada de emergencia del robot
|
|
Actuadores
|
Función |
|
2 Motores
|
Movimiento |
{kind=link}