
El robot antidesmenuzamiento
Opciones de diferenciación
El modelo es especialmente adecuado para establecer y experimentar sistemáticamente distintos modos de conducción modificando el ángulo de corrección durante la marcha. Mediante la diferenciación, el vehículo puede ampliarse con poco esfuerzo con un sensor adicional (sensor gestual RGB) para aumentar el grado de autonomía.
Aspectos motivacionales
Existe un gran deseo de construir un vehículo que se controle a sí mismo de la forma más autónoma posible utilizando varios sensores diferentes. También puede haber interés en añadir otros componentes útiles al sistema (por ejemplo, interruptor principal, interruptor trasero, optimización de la función de limpieza integrando un depósito de goteo...). Esto puede tratarse en el debate en clase.
|
Funcionamiento del sistema
|
Solución técnica |
|
Activación del ciclo de limpieza
|
Pulse el botón de inicio en el RX Controller |
|
Recorrido de limpieza frontal
|
Activación de ambos motores |
|
Golpear un obstáculo |
Activación de uno de los botones, parada de los motores
|
|
Corrección del sentido de la marcha debido a un obstáculo detectado a la derecha
|
Rearme del vehículo, giro de unos 20° (4 impulsos) hacia la izquierda, continuación de la marcha |
|
Corrección del sentido de la marcha debido a un obstáculo detectado a la izquierda |
Reajuste el vehículo, gire aprox. 20° (4 impulsos) hacia la derecha, continúe la marcha
|
|
Renovar el accionamiento de limpieza frontal |
Activar ambos motores
|
|
Diferenciación: Activación de la protección anticaída en el borde de la mesa |
Parar los motores, invertir los motores y contar los impulsos, cambiar el sentido de marcha, continuar la marcha
|
|
Sustitución del medio de limpieza |
Abrir el dispositivo de sujeción para un paño de limpieza en la parte trasera del vehículo
|
|
Ajustar el medio de limpieza
|
Ajustar la articulación de fijación del limpiaparabrisas |
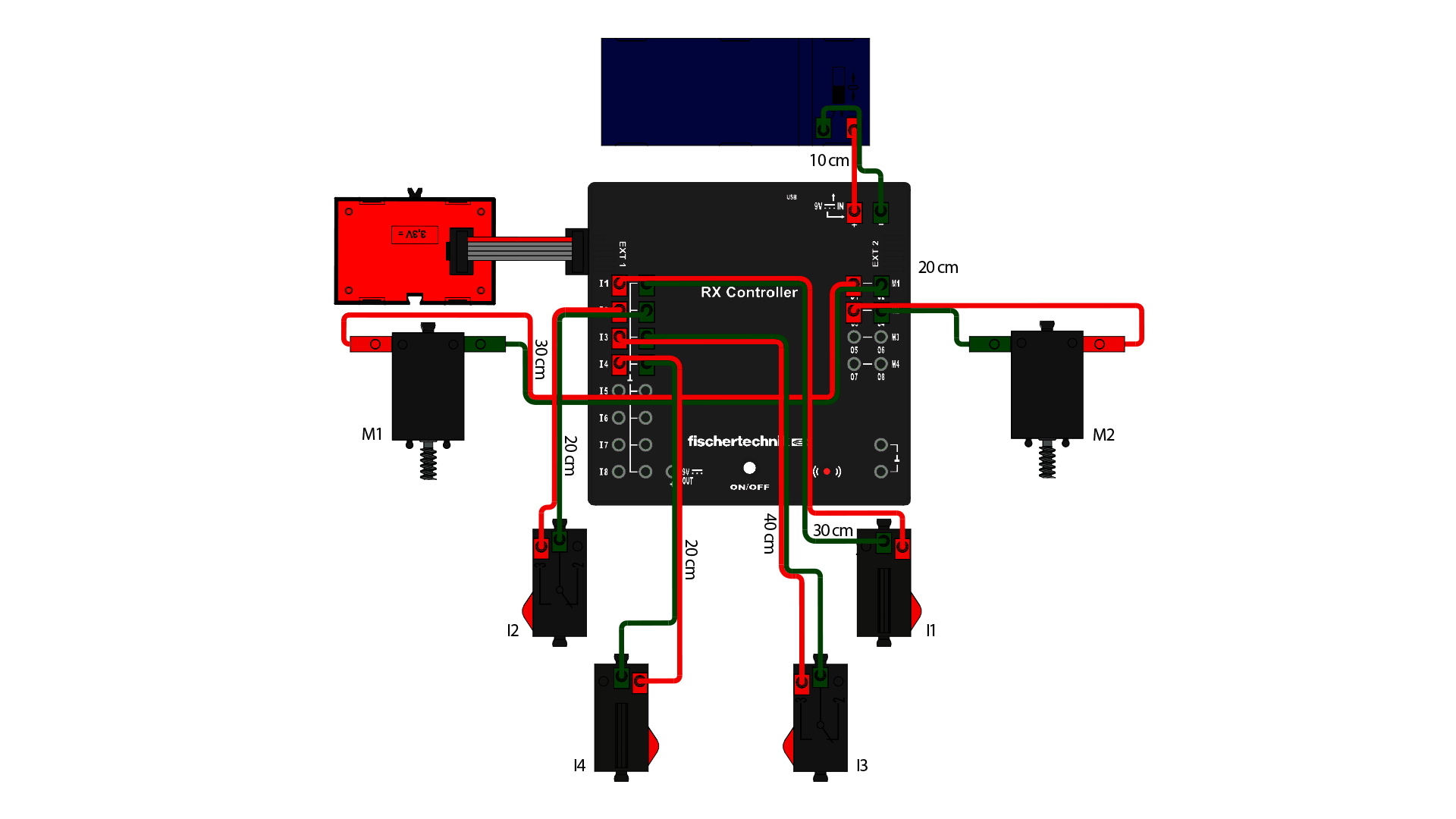
Lista de materiales del circuito básico
|
Sensores
|
Función |
|
2 botones
|
Detección de obstáculos |
|
2 botones |
Recuento de impulsos de los motores
|
|
Diferenciación: 1 sensor gestual RGB |
Evita caídas desde una posición elevada
|
|
|
|
|
Actuadores
|
Función de los actuadores |
|
2 motores
|
Cada uno para un eje |
{kind=link}