
¡Hola!
¡Nos alegra mucho que hayas elegido el kit "Smart Robots Max" de fischertechnik! Con este kit, podrás realizar una gran cantidad de experimentos interesantes y resolver desafiantes tareas.
Al leer el material de acompañamiento y probar los experimentos y tareas, aprenderás paso a paso cómo controlar y programar máquinas y robots simples y también complejos con el controlador RX de fischertechnik.
Como suele suceder al aprender, no siempre podemos empezar con las cosas más difíciles, aunque estas suelen ser un poco más interesantes que las más simples. Por eso hemos estructurado los experimentos y tareas en este manual de tal manera que cada nueva tarea te enseñe algo diferente, que luego podrás aplicar en la siguiente tarea.
Así que no te preocupes, comenzamos de manera pequeña y avanzamos juntos hacia los grandes robots.
¡Ahora te deseamos mucha diversión y éxito experimentando con el Smart Robots Max!
Tu equipo de fischertechnik

Eso es todo lo que está incluido en el kit.
Primero que nada, encontrarás numerosos bloques de construcción de fischertechnik, además de motores, lámparas y sensores, así como un manual de construcción a color para ensamblar los diferentes modelos.
Una vez que hayas sacado todos los bloques de construcción, tendrás que ensamblar algunas piezas antes de comenzar (por ejemplo, cables y conectores). Qué piezas son exactamente, se describe en el manual de construcción bajo "Consejos de montaje". Es mejor que lo hagas primero.
Actuadores
Los actuadores son todos los componentes que pueden llevar a cabo una acción. Esto significa que, cuando se conectan a una corriente eléctrica, se vuelven "activos" de alguna manera. Por lo general, esto es visible directamente. Un motor gira, una lámpara se enciende, etc.
Mini-motor
El mini motor es un motor eléctrico que tiene exactamente la misma longitud y altura que un bloque de construcción de fischertechnik. Además, es muy ligero. Esto te permite instalarlo en lugares donde no hay espacio para los motores grandes.
El engranaje que viene con el kit encaja perfectamente en el mini motor. El mini motor está diseñado para funcionar con una tensión de alimentación de 9 voltios y un consumo máximo de corriente de 0,3 amperios.

Engranaje
El engranaje incluido en el kit se adapta perfectamente al mini motor. El mini motor está diseñado para funcionar con una tensión de alimentación de 9 voltios y un consumo máximo de corriente de 0,3 amperios.

LEDs
Un LED está incluido en el kit. Puede ser utilizado, por ejemplo, como luz de señal o como luz intermitente en un robot.
Atención:
Al conectar el LED a la fuente de alimentación, debes prestar atención a la polaridad correcta. El polo positivo debe estar conectado al LED en la marca +.

Sensores
Los sensores son, en cierto sentido, los contrapartes de los actuadores. No realizan acciones, sino que responden a situaciones y eventos específicos. Por ejemplo, un botón responde a una "presión de botón", al permitir o interrumpir el paso de corriente eléctrica. Un sensor de temperatura responde a la temperatura en su entorno.
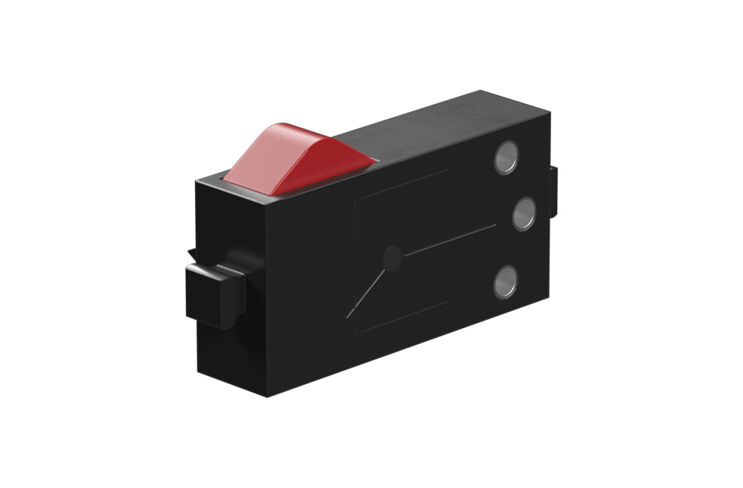
Interruptor de pulsador
El interruptor de pulsador, también conocido como sensor de contacto. Al presionar el botón rojo, se activa mecánicamente un interruptor, haciendo que la corriente fluya entre los contactos 1 (contacto central) y 3. Al mismo tiempo, se interrumpe el contacto entre los terminales 1 y 2. De esta manera, puedes usar el sensor de contacto de dos maneras diferentes:
Como "cerrador":
Los contactos 1 y 3 están conectados. El botón está presionado: la corriente fluye. El botón no está presionado: no hay corriente.
Como "abridor":
Los contactos 1 y 2 están conectados. El botón está presionado: no hay corriente. El botón no está presionado: la corriente fluye.
Sensor de gestos
El sensor de gestos es un nuevo componente de sensor de fischertechnik. Es un pequeño multitarea con funciones de reconocimiento de gestos, reconocimiento de color, medición de distancia y detección de luz ambiental. La descripción detallada del sensor y cómo se programa se encuentra en la tarea "Interruptor crepuscular".

Sensor de línea IR
El sensor de línea de infrarrojos es un sensor digital para detectar una línea negra sobre un fondo blanco con una distancia de 5 a 30 mm. Consiste en dos elementos de transmisión y recepción.

Software ROBO Pro Coding
Una 'interfaz gráfica de programación' significa que no tienes que 'escribir' los programas línea por línea a mano, sino que puedes simplemente ensamblarlos visualmente con la ayuda de símbolos gráficos.
La forma exacta de crear un programa de esta manera está detallada en el capítulo 'Primeros Pasos'.
RX Controller
El controlador RX es el núcleo de este kit. Controla los actuadores y evalúa la información de los sensores. Para esta tarea, el controlador RX cuenta con numerosos puertos a los que puedes conectar los componentes.

El controlador cuenta con:
Cómo interactúa el controlador con cada componente y qué deben hacer exactamente se establece mediante el programa que creas en el software ROBO Pro Coding.

Suministro eléctrico
Dado que muchos de los componentes del Smart Robots Max requieren electricidad, naturalmente necesitarás también una fuente de alimentación. En el kit se incluye el soporte de batería de fischertechnik para 6 pilas AA. Las pilas no están incluidas en el kit. Abre el soporte de la batería e inserta 6 pilas tipo AA. Presta atención a la polaridad correcta. La marca en cada compartimento de la batería te muestra cómo insertar cada pila correctamente.



