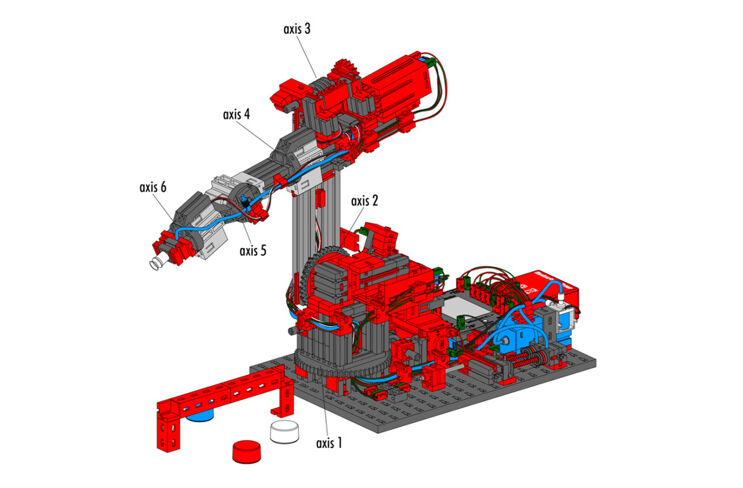
The 6-axis robot from fischertechnik enables learners to get to grips with industrial robotics and prepare themselves practically for the
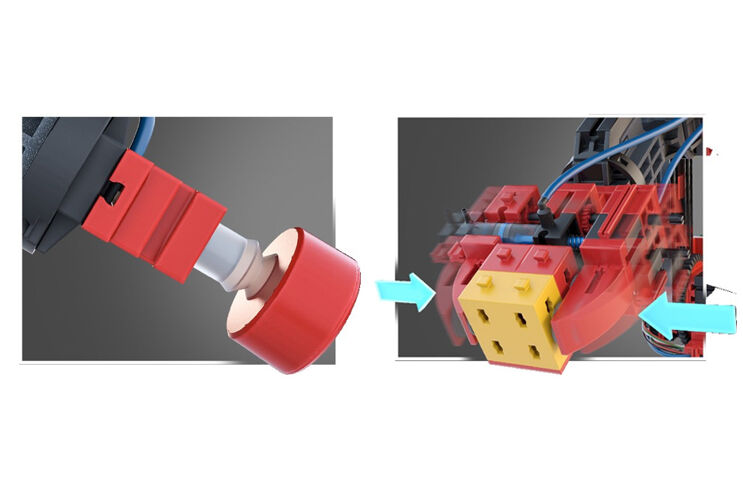
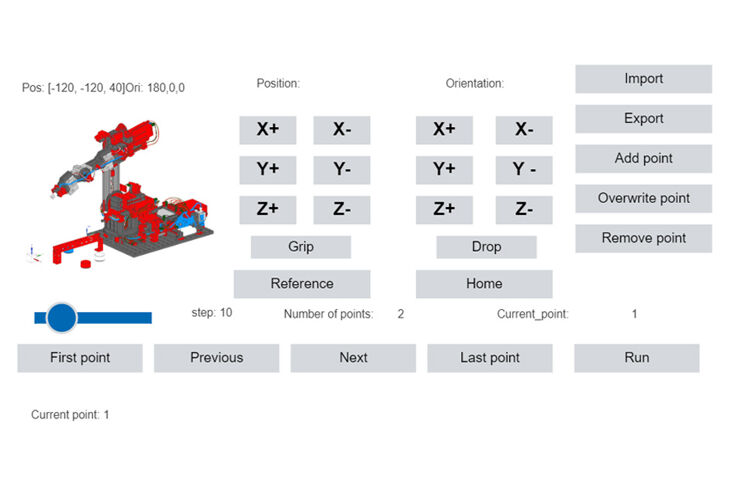
demands of the modern working world. The realistic six-axis robot is supplied fully assembled. It can be equipped with both a vacuum suction gripper and a gripper and can be converted quickly and easily. Both end effectors are supplied. Three of the six axes are controlled by encoder motors, three others by digital servos. Programming is carried out using either Python or ROBO Pro Coding. A teach-in interface in ROBO Pro Coding also makes it easy to train different positions. The TXT 4.0 Controller serves as the robot controller. This hands-on experience makes it possible not only to acquire theoretical knowledge, but also to develop practical skills. Through the accompanying didactic material and interaction with our models, learners develop not only technical know-how but also analytical thinking, problem-solving skills and practical teamwork. A 9V power supply (power supply unit 505287) is also required

Industrial robots have become an integral part of the modern manufacturing industry. They are mostly used in factories to carry out repetitive tasks quickly and with high precision. In this introduction, we will look at their structure and basic functionality. We take a look at the history of their development and find out why industrial robots have become indispensable in many industries today.