

Descargar ROBO Pro Coding App
Antes de empezar, tienes que descargar la aplicación. Sólo tiene que seleccionar el sistema operativo adecuado y hacer clic en el enlace:

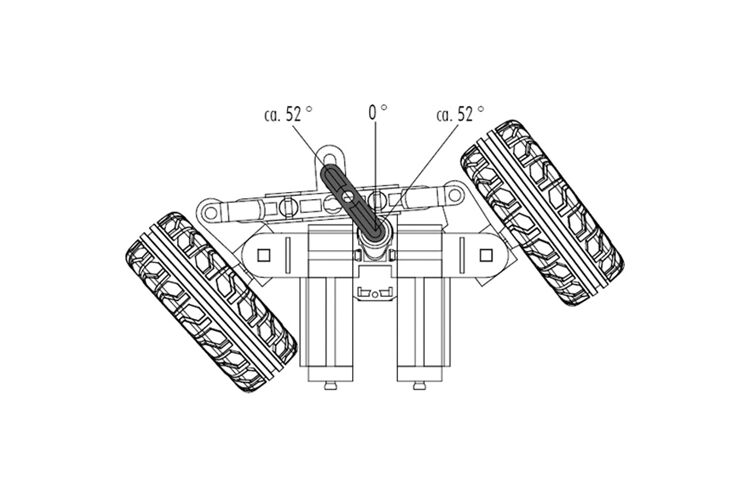
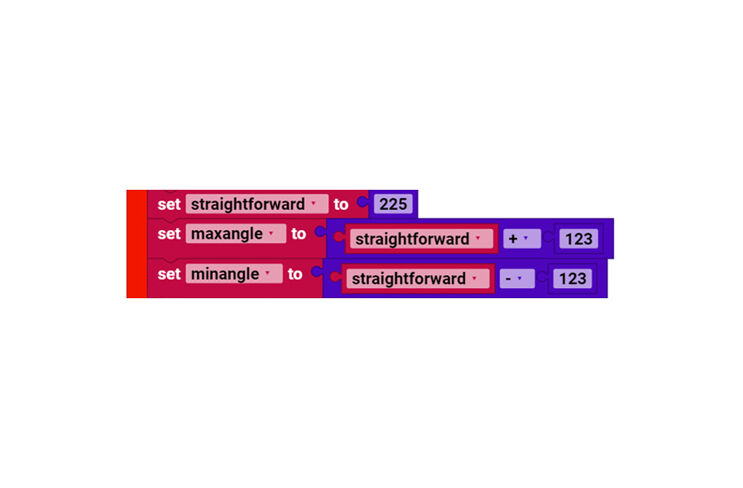
Las posiciones de la servopalanca varían con los distintos servomotores. Por lo tanto, es aconsejable calibrar la posición cero y la desviación máxima utilizando variables.
Si está utilizando una configuración personalizada para la dirección de la mangueta, asegúrese de que la servo palanca no golpea el soporte del servo o su chasis. La desviación máxima hasta el tope del soporte del servo es de +/- 58°.
Para más información
Si desea más sugerencias para su proyecto de robótica, en Robo Pro Coding encontrará varios programas de ejemplo que incluyen una pantalla o una cámara configuradas. Para ello, no seleccione una plantilla vacía en un nuevo proyecto, sino "Ejemplo".
Puede acceder a la documentación de Robo Pro Coding a través del siguiente enlace:
ROBO Pro Coding Libros