¡Hola!
Nos alegramos que te hayas decidido por el kit de construcción "ROBOTICS Smarttech" de fischertechnik. Con este kit de construcción puedes realizar una cantidad de experimentos interesantes y solucionar atrayentes tareas.
Al leer este material didáctico de ayuda y probar las tareas y los experimentos, aprenderás paso a paso como con el ROBOTICS TXT Controller de fischertechnik se pueden controlar y programar sencillas y también complejas máquinas y robots. Como sucede al aprender, no se puede comenzar inmediatamente con las cosas más difíciles, aun cuando estas naturalmente con frecuencia son un poco más interesantes que las algo más sencillas. Por eso hemos estructurado los experimentos y las tareas en este cuaderno de tal manera, que con la nueva tarea aprendes algo más, que puedes a su vez aplicar en la siguiente tarea.
Entonces, no temas, comenzamos modestamente y juntos avanzaremos hasta los robots grandes.
Ahora te deseamos mucho éxito y satisfacción al experimentar con el ROBOTICS Smarttech.
Tu equipo de
fischertechnik

Electricidad
Como seguramente sabes, muchos de los componentes del Smarttech funcionan con corriente eléctrica. En asuntos que tienen que ver con la corriente, se debe observar especialmente, de no cometer ningún error. Por esta razón observa siempre exactamente las instrucciones de construcción, cuando se trata del cableado de componentes eléctricos.
De manera alguna puedes conectar el polo positivo y el negativo entre sí, o sea ponerlo en cortocircuito. De este modo el TXT Controller, o también el acumulador, puede dañarse.
Electricidad y electrónica es un tema tan interesante como la robótica (o sea, de lo que se trata en este kit de construcción), y fischertechnik dispone de un kit de construcción que se ocupa de este tema. Si te interesas por ello, tendrás tantas satisfacciones con el kit de construcción "PROFI E-Tronic" como con el Smarttech.
¿Robot, el ser humano artificial?
¿En qué piensas cuando escuchas la palabra "robot"? ¿Has visto ya alguna vez un robot? ¿En el cine o en la televisión? ¿O quizás ya alguno auténtico?
Existen innumerables tipos diferentes de robots. Algunos se parecen un poco a un humano, otros sólo están constituidos de uno o varios brazos. ¿Qué es entonces lo que hace que un robot sea lo que es?
En el diccionario dice: "Robots son máquinas fijas o móviles, que cumplen tareas prefijadas de acuerdo a un determinado programa."
ROBOTICS, (casi) todo automático
Robots entonces son máquinas, las cuales están controladas a través de un programa. Este control de máquinas (o en nuestro caso modelos) los llamamos "ROBOTICS".
Con el "ROBOTICS Smarttech" puedes acceder de forma fantástica a este tema. Porque el kit de construcción contiene todo lo que necesitas para la construcción y control de muchas máquinas diferentes.
Los programas para el control de los modelos los puedes confeccionar tú en el PC, con ayuda del software ROBO Pro 4.7.0 (o superior) y a continuación a través de una conexión USB, Bluetooth o WLAN transmitirlos al TXT Controller. El Controller "controla" y comanda entonces el modelo de acuerdo a la programación que tú has creado.
Todo está dentro del kit de construcción
Primero encontrarás numerosos elementos fischertechnik, además de motores, lámparas y sensores, así como unas coloridas instrucciones de construcción de los diferentes modelos.
Cuando hayas desembalado todos los elementos, debes montar primero algunos componentes antes que puedas empezar (p.ej. cables y conectores). Cuales son exactamente, está descrito en las instrucciones de construcción bajo "Sugerencias de montaje". Realiza esto de preferencia inmediatamente como primero.
Actores
Se denominan actores a todos los componentes que pueden ejecutar una acción. Esto significa, cuando se los conecta a una corriente eléctrica, de alguna forma se tornan "activos". En la mayoría de los casos, esto se puede ver directamente. El motor gira, una lámpara se enciende, etc.
Motor Mini
El motor Mini es un motor eléctrico, que es tan largo y tan alto como un elemento fischertechnik. Además es sumamente ligero.De este modo lo puedes montar en lugares, en los cuales no hay lugar para los motores grandes.
El engranajes, que asimismo se adjunta al kit de construcción, se adaptan exactamente al motor Mini.
El motor Mini está dimensionado para una tensión de alimentación de 9 Voltios y un consumo de corriente de máximo 0,3 Amperios.

LEDs
Un LED está contiene en el kit de construcción. Estos pueden ser empleados de forma muy versátil. Por ejemplo como luces de señalización en un semáforo, como luz intermitente en un robot o para una mejor iluminación de la imagen que suministra la cámara, que a su vez está incluida en el kit de construcción.
El LED está dimensionado para una tensión de 9 Volt y consumen aprox. 0,01 Amperios de corriente.
Atención: En la conexión del LED al suministro de corriente debes observar la correcta polaridad. El polo positivo debe ser conectado a la marcación + en el LED.

Sensores
Los sensores son en cierta medida las contrapiezas de los actores. Porque no ejecutan ninguna acción, sino reaccionan a determinadas situaciones y sucesos. Un pulsador reacciona por ejemplo a la "presión de un botón", dejando pasar o interrumpiendo una corriente eléctrica. Un sensor de calor reacciona a la temperatura de su entorno.
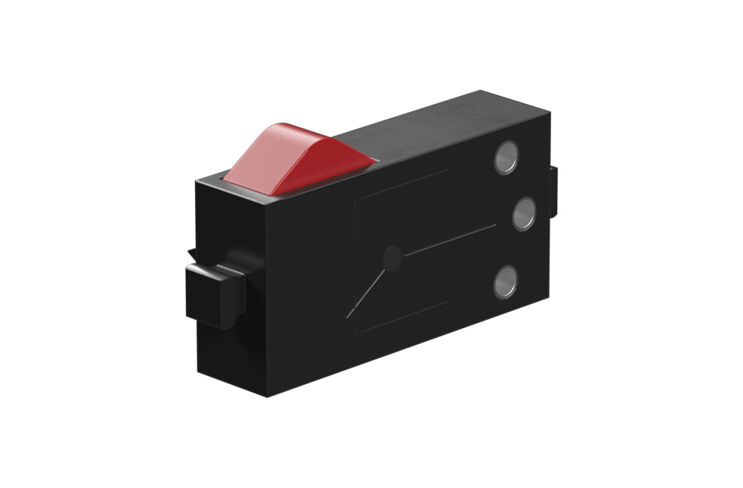
Pulsadores
Al pulsador también se le llama sensor de contacto. Al accionar el botón rojo se conmuta mecánicamente el interruptor, fluye corriente entre los contactos 1 (contacto central) y 3. Simultáneamente se interrumpe el contacto entre las conexiones 1 y 2. De este modo puedes emplear el pulsador de dos modos diferentes:
Como "cierre":
Se conectan los contactos 1 y 3.
Pulsador oprimido: fluye corriente. Pulsador no oprimido: no fluye ninguna corriente.
Como "ruptor":
Se conectan los contactos 1 y 2.
Pulsador oprimido: no fluye ninguna corriente. Pulsador no oprimido: fluye corriente.
Sensor de gestos
El sensor de gestos es un nuevo componente sensorial de fischertechnik. Se trata de un pequeño dispositivo multiuso con las funciones de reconocimiento de gestos, reconocimiento de colores, medición de distancia y detección de luz ambiental. El propio sensor y cómo programarlo se explican con más detalle en la tarea «Interruptor crepuscular».

Fundamentos de las ruedas omnidireccionales de fischertechnik
La rueda Mecanum es una rueda que permite a un vehículo equipado con ella realizar maniobras de desplazamiento omnidireccional (movimiento en cualquier dirección) sin necesidad de contar con una dirección mecánica. Es por eso que nuestras ruedas se llaman ruedas omnidireccionales.
A veces se la llama rueda Ilon en honor a su inventor, Bengt Ilon. A diferencia de la rueda omnidireccional, los rodillos de la rueda Mecanum forman un ángulo con el eje principal.
¿Y cómo funciona?
En la circunferencia de la rueda (la «llanta») hay varios rodillos giratorios en forma de barril que suelen formar un ángulo de 45° con respecto al eje la rueda. Solo estos rodillos tienen contacto con el suelo. No tienen accionamiento directo y pueden girar libremente alrededor de su eje de apoyo diagonal.
Por el contrario, la rueda Mecanum se acciona mediante un motor de accionamiento, por ejemplo, un minimotor, y un engranaje con sentido de giro y número de revoluciones variables.
Los vehículos equipados con ella normalmente tienen cuatro ruedas de este tipo dispuestas en forma de rectángulo («disposición del vehículo»).
En ese caso, en la superficie de apoyo, los ejes de los rodillos inclinados deben apuntar en forma de estrella hacia el centro del vehículo o todos los ejes giratorios de los rodillos deben estar en círculo (diferente elección de los ángulos de los rodillos en los ejes delantero y trasero – cada uno +45° o -45° con respecto al eje de la rueda Mecanum).
Si no se cumple este criterio, no podrán generarse fuerzas de accionamiento omnidireccionales. Solo con la disposición en círculo de las superficies de apoyo es posible lograr un giro alrededor de su centro, lo que se desea en la mayoría de las aplicaciones.
Otro dato técnico:
El número de revoluciones y la dirección de giro de cada rueda se ajustan de forma individual. En casos extremos, esto permite que un vehículo se mueva de forma transversal solo girando las ruedas de los ejes delantero y trasero en direcciones opuestas, sin moverse «hacia adelante» ni tener que realizar un giro alrededor del eje central.
Para estar óptimamente preparado para la programación de los modelos, puede descargar aquí una hoja de resumen sobre el accionamiento y los sentidos de giro de las Omniwheels.
ROBOTICS TXT Controller
El ROBOTICS TXT Controller es el núcleo de este kit de construcción ROBOTICS. Este controla los actores, y evalúa las informaciones de los sensores.
Para esta tarea el TXT Controller dispone de numerosas conexiones a los que puedes conectar los componentes. Qué componentes se pueden conectar a qué conexiones y cuáles son las funciones de las conexiones, está descrito en el manual de instrucciones del TXT Controller.
A través del display táctil a color puedes manejar confortablemente el TXT Controller. Una especial exquisitez es la interfaz integrada Bluetooth y WLAN. A través de ella puedes conectar sin cables tu PC con el TXT Controller, y también varios Controller entre sí. Como el Controller se maneja con los componentes individuales y qué es lo que individualmente deben hacer, lo determinas en el programa que escribes en el software ROBO Pro.
Software ROBO Pro 4.7.x
ROBO Pro ist eine grafische Programmieroberfläche, mit der du die Programme für den ROBOTICS TXT Controller erstellen kannst.
„Grafische Programmieroberfläche“ bedeutet, dass du die Programme nicht Zeile für Zeile von Hand „schreiben“ musst, sondern mit Hilfe von grafischen Symbolen einfach bildlich zusammenstellen kannst. Ein Beispiel für so ein Programm siehst du links abgebildet.
Wie man so ein Programm genau erstellt, ist in dem Kapitel „Erste Schritte“ ausführlich beschrieben. Auch die ROBO Pro Hilfe zeigt dir in den Kapiteln 3 und 4 wie das funktioniert.
Algunas sugerencias
Experimentar produce las máximas satisfacciones, cuando los experimentos también funcionan. Por esta razón al montar los modelos debes observar algunas reglas básicas:
Trabajar cuidadosamente
Tómate tu tiempo y mira detenidamente en las instrucciones de construcción para el modelo. Cuando posteriormente se debe buscar un error, se lleva mucho más tiempo.
Comprobar las piezas móviles
Controla durante el montaje siempre si las piezas que deben moverse también permiten moverse con facilidad.
Utilizar prueba de interfaz
Antes que comiences a escribir un programa para tu modelo, debes comprobar todas las piezas conectadas al TXT Controller con ayuda de la prueba de interfaz de ROBO Pro. Como funciona esto exactamente está explicado en ROBO Pro Ayuda en el capítulo 2.4.
Prueba de interfaz
También aquí nuevamente la indicación: comprueba el funcionamiento de los componentes individuales con ayuda de la prueba de interfaz en ROBO Pro.
Cortocircuitos
Tienes un cortocircuito, cuando una conexión positiva y una negativa se tocan. Tanto el acumulador, como también el TXT Controller tienen incorporado un fusible, de manera tal que ante un cortocircuito no sean dañados. Estos simplemente cortan la alimentación de corriente durante un momento. En este caso naturalmente tu modelo tampoco funcionará.
La causa para un cortocircuito puede ser ya sea, un error en el cableado o también tornillos poco apretados en los conectores. Estos puede tocarse cuando el conector está enchufado adecuadamente y de ese modo generar un cortocircuito. Por esta razón debes enroscar siempre completamente los tornillos, de tal modo, que estos no puedan tocarse.
Cables y cableados
Cuando un componente eléctrico no funciona de manera alguna, comprueba primero el cable, con el que los has conectado al TXT Controller. Conecta para ello el acumulador con un cable a lámpara de lente. Si la bombilla se enciende, el cable debería estar en orden. También conectores mal montados (p.ej. un conector verde sobre un cable rojo) pueden ser una fuente de errores. Comprueba también, si "+" y "–" están conectados correctamente. Compara para ello tu modelo con las imágenes de las instrucciones de construcción.
Cables y cableados
Cuando un componente eléctrico no funciona de manera alguna, comprueba primero el cable, con el que los has conectado al TXT Controller. Conecta para ello el acumulador con un cable a lámpara de lente. Si la bombilla se enciende, el cable debería estar en orden. También conectores mal montados (p.ej. un conector verde sobre un cable rojo) pueden ser una fuente de errores. Comprueba también, si "+" y "–" están conectados correctamente. Compara para ello tu modelo con las imágenes de las instrucciones de construcción.
Contacto flojo
Un componente, que alternadamente funciona y luego ya no lo hace, tiene presumiblemente en algún lugar de su cableado, un contacto flojo.
Las causas más frecuentes para ello son:
Error en el programa
Aun cuando a nadie le gusta admitirlo: cada uno comete errores. Ante todo en programas complejos se introduce rápidamente un error de este tipo.
Entonces cuando has comprobado todo en el modelo mismo y has subsanado todos los errores y tu modelo aún no hace lo que tú quieres, debes también comprobar aún tu programa. Verifícalo paso por paso y controla su encuentras algún error.
En modo online, o sea cuando el TXT Controller está conectado con el PC, puedes seguir el programa también en la pantalla durante la ejecución. El elemento de programa activo en cada caso se resalta, de manera tal que siempre puedas ver en qué punto se encuentra justamente el programa y donde se presenta el error.
Los últimos comodines
Si a pesar de todo no has encontrado el error, existen aún dos posibilidades de cómo obtener ayuda:
Comodín E-Mail:
Nos puedes enviar un E-Mail a fischertechnik, y relatarnos tu problema.
La dirección de E-Mail es info@fischertechnik.de
El comodín del público
Puedes visitarnos también en Internet bajo: https://www.fischertechnik.de. Allí entro otros existe un foro, donde seguramente se te podrá ayudar. Además puedes hacerte socio sin cargo del fischertechnik Fanclub.
Aún no hemos llegado al final
¿Esto ha sido todo? No, naturalmente que no. Los experimentos y modelo que has conocido y probado en este e-learning, sólo tienen que ser el comienzo. Dicho de otra manera, tus "primeros pasos" en el área temática enorme e interesante "ROBOTICS".
Fantasía
Lo que te hemos mostrado aquí es sólo una mínima parte de las posibilidades que tienes con el TXT Controller y los componentes fischertechnik. A partir de ahora está todo en tus manos. Puedes desplegar libremente tu fantasía y sencillamente construir con toda libertad.
Modificar lo existente
Si aún no tienes una idea para un modelo propio completo, echa una mirada simplemente a los modelos de este cuaderno. Quizás se te ocurra algo, de lo que harías diferente en tus modelos. O modificas la función de un modelo.
Máquina de dibujo
Por ejemplo en una robot de desplazamiento también se podría fijar un lápiz, que entonces puede hacerse elevar o descender y que dibuje sobre un papel grande mientras que el robot pasa sobre él. En ese caso no sólo puede desplazarte por las figuras, sino hasta delinearlas. Del robot de desplazamiento ahora se ha convertido en una máquina de delinear.
Carreras con amigos
También puedes delinear una pista de recorrido propia sobre un papel con un marcador grueso de fibra y hacer circular el robot a lo largo de ella. Por otra parte, si tus amigos también tienen un TXT Controller, las cosas se ponen aún más interesantes. Se pueden organizar carreras, en las que el robot más rápido sigue con maestría una pista de recorrido preestablecida.
Desprenderse de forma inalámbrica
¿Tiene tu ordenador una interfaz WLAN? En caso afirmativo, puedes conectar entonces el TXT Controller con el ordenador también a través de WLAN en lugar de un cable USB. En caso negativo, puedes comprarte un USB WLAN-Stick y a través de él comunicar el TXT Controller de forma inalámbrica con tu PC. Como funciona esto lo puedes consultar en el manual de instrucciones del TXT Controller y en: http://www.fischertechnik.de .
La perseverancia merece la pena
¿Entonces, a qué esperas? En marcha. Descubre y experimenta. Y no te dejes detener por pequeños reveses. Para experimentar se necesita ante todo también paciencia y dedicación. El premio es después un modelo en funcionamiento.
Te deseamos mucha diversión para la experimentación de tus propias ideas!
