
I'm getting my act together!
Differentiation options
Depending on the duration of the series of lessons and the strength of the pupils
the position of the obstacle blocks and the routes can be specified,
the position of the obstacle blocks can be measured by the pupils,
the route program blocks can be specified,
measure the routes themselves,
program the routes themselves,
obstacles are collected using arms.
Motivational aspects
All students are familiar with the topic of autonomous driving robots from daily life. In many househoulds, robotic vacuum ceaners and lawn mower have long been part of daily life, along with many other smart applications. Semi-autonomous cars are becoming increasingly common on the roads.
If available, a robot from film and television (BB8, R2D2, Wall-E), a robot vacuum cleaner or another real object from the field of robotics/conveyor vehicles can be used for the introductory phase of the topic. Drawing media (paper, whiteboard or projection screen)
|
Functions of the sensors/actuators |
Technical solutions |
|
Performing a straight-ahead movement |
Simultaneous and uniform control of the two drive motors |
|
Executing a left-turn movement |
Controlling one of the two drive motors |
|
Executing a right-turn movement |
Controlling one of the two drive motors |
|
Start of a robot run |
Inputting a signal at the On/Off button of the controller |
|
End/emergency stop of a robot run |
Inputting a signal at the On/Off button of the controller |
|
Differentiation:Rapid spinning on the spot (left/right) |
Smooth and simultaneous control of the two drive motors in different directions |
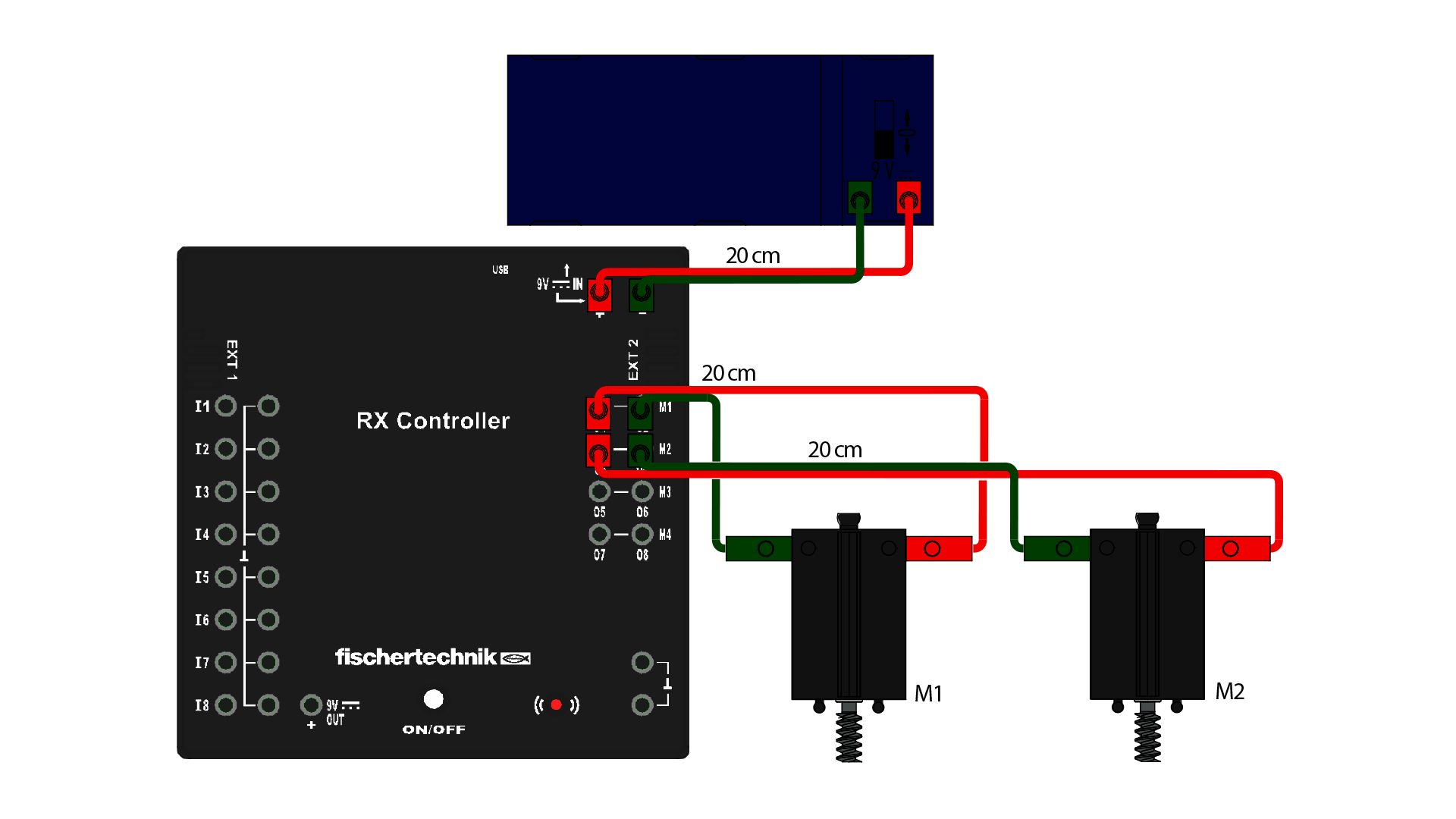
Material list for the basic circuit of the driving robot
|
Sensors
|
Function |
|
1 On/Off button on the controller |
1. Turning the robot on 2. Emergency stop of the robot |
|
Actuators
|
Function |
|
2 motors
|
Movement |
{kind=link}