- Home
- Schools
- Learning material
- STEM Coding Max
- Model-9-Claw-machine

Im going to get you!
|
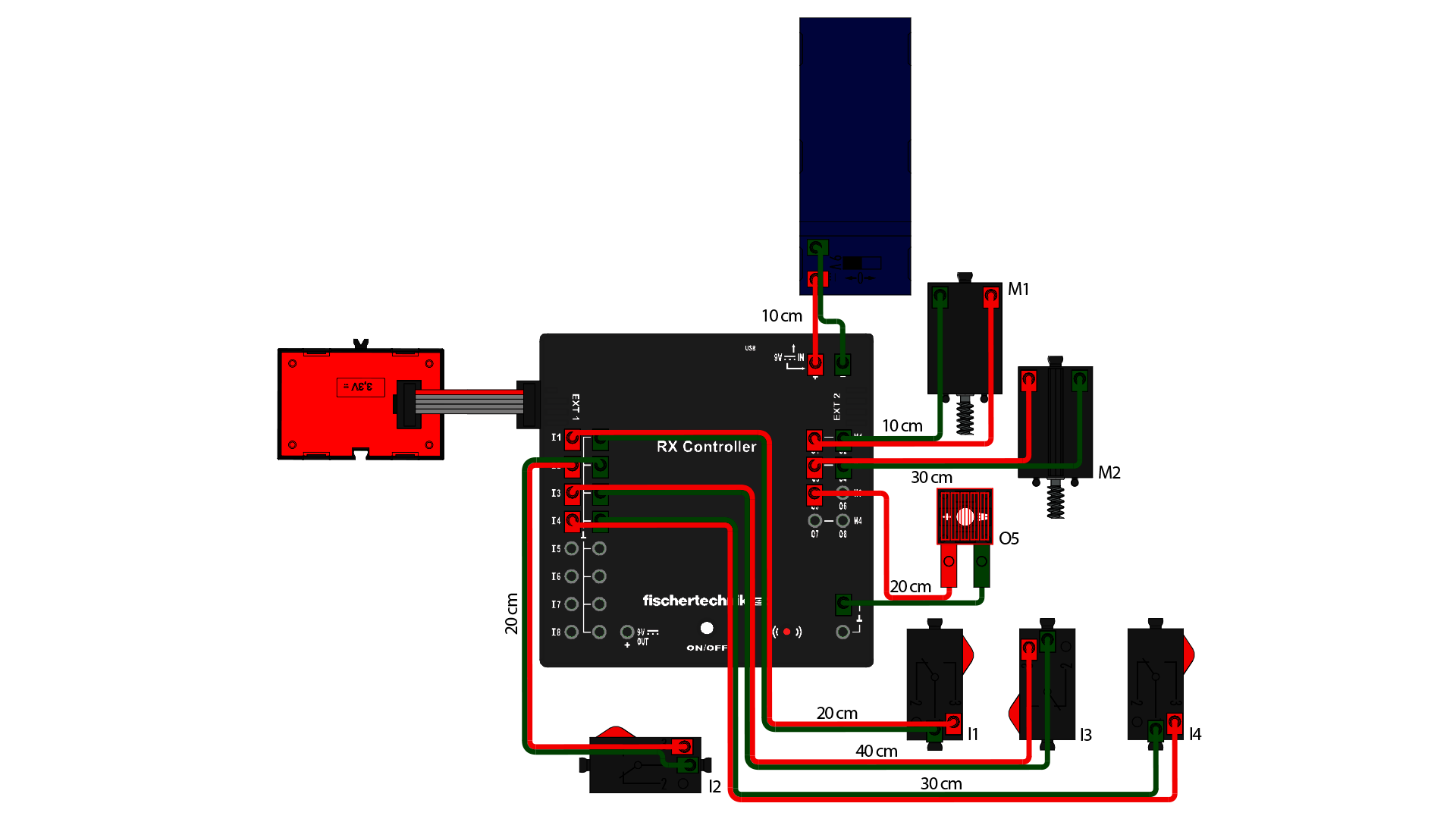
Functions of the Sensors/Actuators
|
Technical solution |
|
Recording gestures
|
Evaluating the signals on the gesture sensor |
|
Light output
|
Illumination of the red LED
|
|
Sensors
|
Function |
|
1 RGB gesture sensor
|
Gesture recognition right/left and forwards/backwards |
|
2 buttons
|
Limit switches x- and y-axis |
|
2 pulse buttons
|
Rotation counter per axis (x/y) in 90° steps |
|
|
|
Actuators
|
Function
|
|
1 motor x-axis
|
Forward / reverse travel |
|
1 motor y-axis
|
Forward / reverse travel |
|
1 LED
|
End of playing time display |
{kind=link}